论文导读
本文介绍了通研院机器人实验室发表于2023年国际机器人顶级会议IROS上的论文,题为《Sequential Manipulation Planning for Over-actuated Unmanned Aerial Manipulators》[1]。文章介绍了一种可以实现空中全向平稳飞行的过驱动空间机械臂平台Coordinated Omni-diRectional oVer-actuated Uam for Sequential manipulation (CORVUS,渡鸦),并结合一套基于虚拟运动链(Virtual Kinematic Chain, VKC)[2,3]的移动操作建模方法,实现了面向空间操作的任务运动规划(Aerial Task and Motion Planning, Aerial-TAMP)。“
渡鸦能够自主、灵活地通过机械臂与环境中的铰链结构物体交互,执行复杂的多步骤操作,为无人机的自主作业开辟了新的方向。这些特点不仅扩大了无人机的应用范围,也为未来技术的发展提供了新的视角和可能性。”
该论文获得了IROS2023最佳移动操作论文提名奖(Best Paper Award on Mobile Manipulation Finalist)。论文的共同第一作者为苏垚(BIGAI)、李佳睿(PKU、BIGAI)、焦子元(BIGAI);其他论文作者包括王濛(BIGAI)、褚驰(THU、BIGAI)、李杭(BIGAI)、朱毅鑫(PKU)、刘航欣(BIGAI)。
,时长02:07
论文链接:
https://ieeexplore.ieee.org/abstract/document/10341441
研究概述
无人机技术在军事侦察、灾害响应、工业检测等多个领域,展现出了巨大的应用潜力和广阔的发展前景,但在控制灵活性和飞行稳定性方面,特别是在复杂或极端环境中,它们仍存在一定的局限性。例如,普通的四旋翼无人机由于设计上的限制,在飞行和悬停过程中难以实现精确的姿态控制,与周围环境的精确交互也较为困难。相比之下,过驱动无人机通过增加执行器和控制自由度,提供了更高的控制精度和适应性,甚至能够实现空间内全向稳定飞行,特别适合应对与复杂环境交互的任务。渡鸦即是采用了一种模块化的过驱动无人机设计,通过组合四台微型四旋翼无人机,实现了对平台的位置和姿态单独控制的过驱动能力,并且具备无限制姿态角和高推力效率的特点。这使得它可以实现侧身悬停和360度的翻转,展现了执行复杂飞行任务时的卓越灵活性,并且极大地拓展了无人机的工作空间。这种结构使无人机在需要精密控制和复杂机动的场合中表现出色,极大地提升了其技术应用的潜力[4-7]。
图1. 基于多个四旋翼和被动自由度机构的过驱动无人机平台
然而,当前的研究工作尚未充分挖掘无人机作为具身智能机器人的潜力,它们仍然停留在执行简单任务的阶段。相比之下,自然界中飞行生物——鸟类,特别是乌鸦,展现出了极高的智能水平。在图2中,乌鸦通过对环境和任务的理解,展示了多步骤行动规划的能力:首先叼起短棍子,然后利用短棍子够到长棍子,最终通过长棍子够到食物。图3中,乌鸦更是展示了复杂因果推理的能力,乌鸦将坚果扔在了人行横道的斑马线上,通过车子碾压,把外壳碾碎之后,开始观察下去吃东西的安全时间。它发现,行人灯亮后,车子停住,行人开始过马路,这个时候是最安全的。通过推理,乌鸦能够利用汽车压碎坚硬的果壳,再观察车、人的行动规律,推断下去吃坚果的安全时间,最终吃到了坚果。


图2. 乌鸦自主规划完成复杂任务 & 图3.乌鸦的物理、因果理解
所以,为了让无人机像乌鸦一样聪明和具备与环境交互的能力,通过对过驱动无人机平台进行动力升级并且加装机械臂后,作者搭建了国际上首个面向空中连续操作任务的空间机械臂平台——渡鸦,如图4所示。
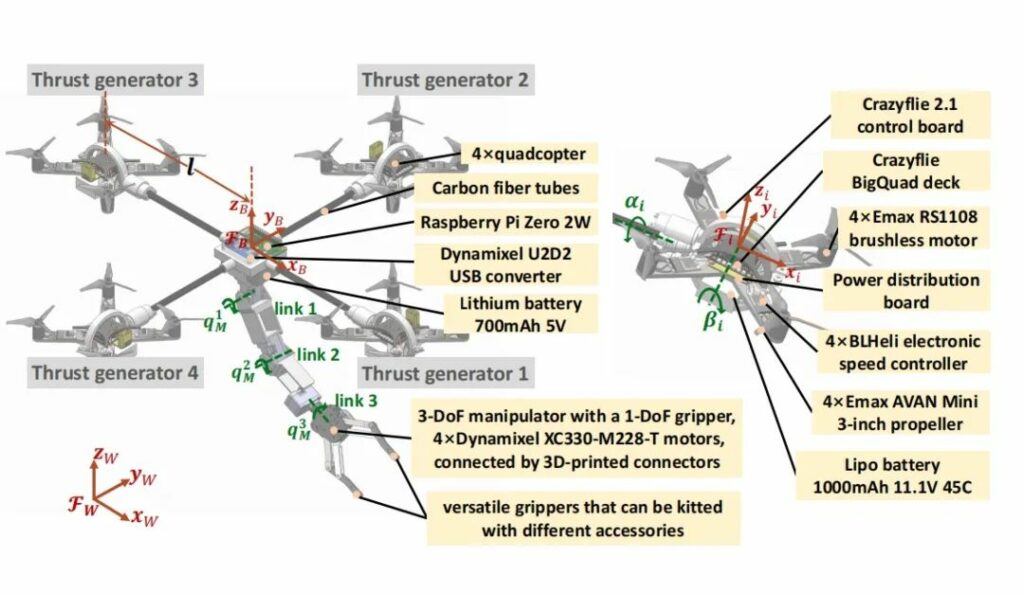
图4. 空间机械臂渡鸦结构设计
基于渡鸦平台,作者同时提出了首个面向空间机械臂的任务运动规划算法框架(Aerial-TAMP)。首先通过任务规划将复杂操作任务划分为多个子任务,再将空间机械臂的自由度与操作对象的自由度通过虚拟运动链(VKC)进行一体化建模[2,3,8],从而实现飞行器、机械臂、操作对象三者之间协调高效的运动规划。
图5在渡鸦平台打开柜子的任务中,展现了无人机-机械臂-被操作物体的协同运动能力。图6中的任务要求渡鸦将桌子上的物体放进抽屉当中,展现了Aerial-TAMP算法框架任务分解以及连续的协同运动规划能力。
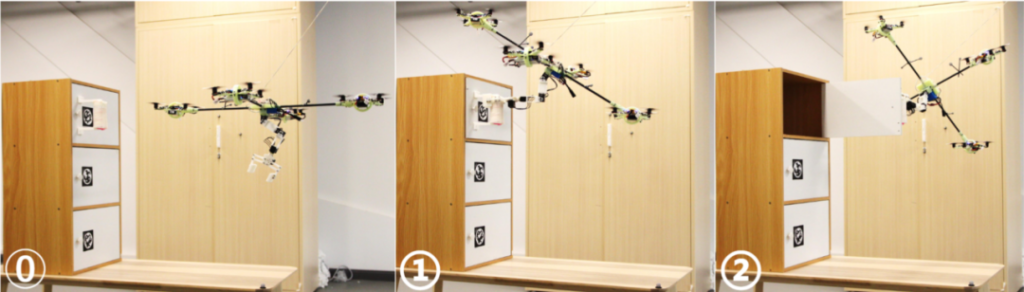
图5. 打开柜门的任务中,实现无人机-机械臂-被操作物体的协同运动规划
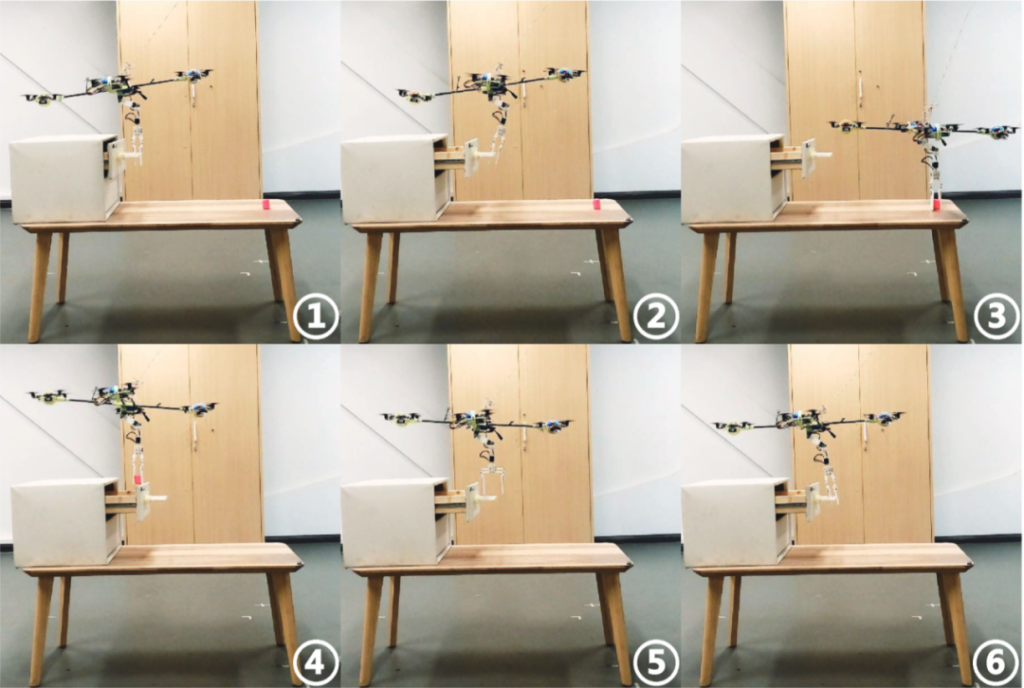
图6. 长序列任务中,同时实现连续任务分解以及协同运动规划
结合层级化控制框架和规避下冲气流影响的控制分配算法[9-10],渡鸦实现了任意姿态下精准的飞行轨迹追踪并能在进行物理交互时维持系统的稳定性,攻克了空间机械臂自主完成复杂操作任务这一前沿课题,实现了最多需要6个连续步骤的复杂操作任务的自主规划执行。
技术特点
气流冲刷现象(Downwash effect)
图7. 基于过驱动无人机的冗余性避免气流冲刷现象
当一台无人机进入另一台无人机产生的气流场时,气流冲刷在这台无人机的机体上,使其无法稳定控制,这种现象被称为气流冲刷现象。气流冲刷现象会大大影响无人机控制的稳定性,进而影响其安全性。对于作者的无人机平台,每个模块彼此之间都有可能遇到气流冲刷现象,这对控制策略提出了很大的挑战。
针对这一问题,作者从控制分配的角度将其建模为一个约束条件下的最优控制问题。作者对每对无人机模块之间构建一个朝向约束,通过该约束来避免二者的气流彼此冲刷,并且将无人机平台的推力效率加入优化问题的目标函数。从而实现了对避免气流冲刷现象与保持无人机平台推力效率的兼顾,使得空间机械臂平台在任意姿态都能实现稳定飞行,并且对于能够对飞行轨迹进行精确追踪。
基于虚拟运动链的任务运动规划(VKC-based Aerial-TAMP)
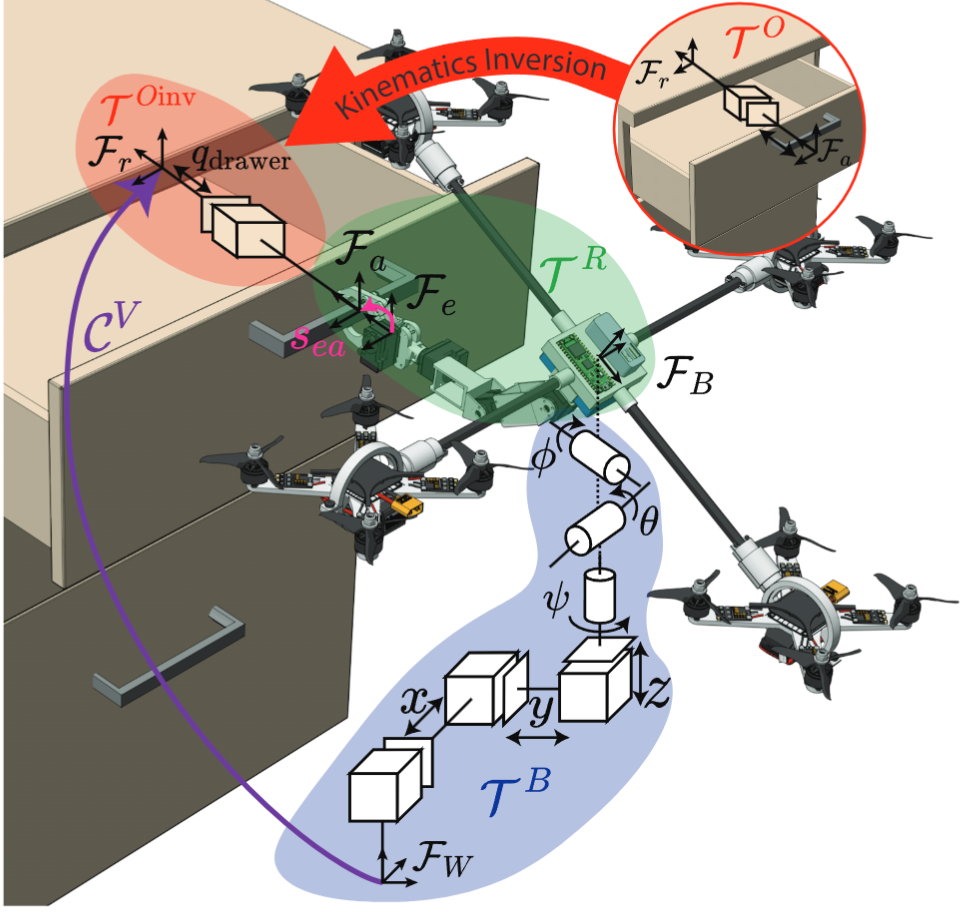
图8. 基于虚拟运动链的一体化建模方法
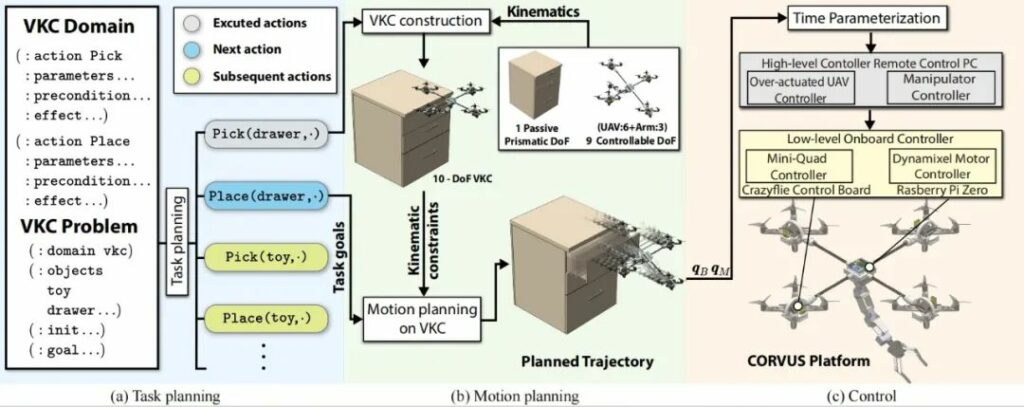
图9. 空间机械臂的任务运动规划算法框架
本项目将一种基于虚拟运动链(VKC)的一体化运动学建模方法(图8)应用到空间机械臂协同运动规划中。区别于传统无人机规划方法仅针对浮动平台,该方法提出将空间机械臂的浮动平台、机械臂和被操作对象通过一体化运动学建模为VKC,并将操作任务转化为面向VKC的运动规划问题,实现三者之间的高效协同运动,适用于狭窄拥挤的环境下的移动操作任务,同时对具有不同运动结构的对象不失一般性。
然后,通过将身体基模(Body Schema)的概念引入基于VKC的建模与运动规划方法,建立了面向多步骤操作任务的Aerial-TAMP框架,VKC可以根据任务序列自由延展或改变自身结构,与各种不同对象进行交互(图9a)。通过将任务序列统一转化为连续的基于VKC的运动规划问题(图9b),实现简化任务序列与运动轨迹间映射机制,提升智能自主规划方法的泛用性与可拓展性,为长流程任务动态视野规划以及未来具身智能机器人的工具使用规划等智能规划打下关键基础。
层级控制架构 (Hierarchical Controller)
过驱动无人机在性能上的显著优势同时也带来了新的挑战,特别是在设计控制算法的复杂性方面。针对渡鸦平台,作者提出了一个基于层级控制架构的高性能控制器(图9c),集成了包括高效姿态控制算法、主动规避多桨气流影响的算法以及执行器失效时的容错控制算法等,有效解决了这些挑战,提升了该平台在复杂环境中的稳定性和可靠性。
总结和展望
展望未来,基于CORVUS的研究成果将有望推动具身智能技术在无人机救援、巡检等领域的应用。随着技术的进一步发展,我们期待看到更多关于连续操作任务的创新研究,为智能机器人的未来发展描绘更加丰富的蓝图。
与此同时,通研院机器人实验室围绕具身智能机器人在三维场景重建、场景理解、任务运动规划、控制算法、工具使用、技能学习、触觉传感、灵巧操作等方面做了一系列研究工作,致力于突破智能体认知架构、价值驱动、人机互信等关键科学问题,推动通用人工智能的创新发展。
团队介绍
苏垚,北京通用人工智能研究院机器人实验室研究员。2021年博士毕业于美国加州大学洛杉矶分校(UCLA)。先后师从于国际著名的机器人专家Dennis Hong教授、国际机电控制专家Tsu-Chin Tsao教授。在IEEE TMECH, IEEE RAL, Mechatronics, IROS, ICRA等国内外知名期刊及学术会议上发表学术论文十余篇。主要从事无人机、足式机器人等非稳定机器人系统的设计开发、运动控制和路径规划等方面的研究。
焦子元,北京通用人工智能研究院机器人实验室研究员。2022年博士毕业于加州大学洛杉矶分校,师从人工智能领域著名教授、Marr奖获得者、现北京通用人工智能研究院院长朱松纯教授。在IJCV, IEEE TCST, IEEE RA-L, Engineering, ICRA, IROS等权威期刊和会议上发表论文十余篇。主持国家自然科学基金青年科学基金。主要从事机器人操作,智能规划,连续任务与运动规划,机器人全身协同规划,优化算法等相关研究。
参考文献
[1] Su, Y., Li, J., Jiao, Z., Wang, M., Chu, C., Li, H., … & Liu, H. (2023). Sequential manipulation planning for over-actuated unmanned aerial manipulators. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
[2] Jiao, Z., Zhang, Z., Wang, W., Han, D., Zhu, S. C., Zhu, Y., & Liu, H. (2021). Efficient task planning for mobile manipulation: a virtual kinematic chain perspective. In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
[3] Jiao, Z., Zhang, Z., Jiang, X., Han, D., Zhu, S. C., Zhu, Y., & Liu, H. (2021). Consolidating kinematic models to promote coordinated mobile manipulations. In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
[4] Yu, P., Su, Y., Gerber, M. J., Ruan, L., & Tsao, T. C. (2021). An over-actuated multi-rotor aerial vehicle with unconstrained attitude angles and high thrust efficiencies. IEEE Robotics and Automation Letters.
[5] Su, Y., Yu, P., Gerber, M. J., Ruan, L., & Tsao, T. C. (2021). Nullspace-based control allocation of overactuated uav platforms. IEEE Robotics and Automation Letters.
[6] Su, Y., Ruan, L., Yu, P., Pi, C. H., Gerber, M. J., & Tsao, T. C. (2021). A fast and efficient attitude control algorithm of a tilt-rotor aerial platform using inputs redundancies. IEEE Robotics and Automation Letters.
[7] Su, Y., Yu, P., Gerber, M. J., Ruan, L., & Tsao, T. C. (2023). Fault-tolerant control of an overactuated uav platform built on quadcopters and passive hinges. IEEE/ASME Transactions on Mechatronics.
[8] Jiao, Z., Niu, Y., Zhang, Z., Zhu, S. C., Zhu, Y., & Liu, H. (2022). Sequential manipulation planning on scene graph. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
[9] Su, Y., Chu, C., Wang, M., Li, J., Yang, L., Zhu, Y., & Liu, H. (2022). Downwash-aware control allocation for over-actuated uav platforms. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) .
[10] Yu, P., Su, Y., Ruan, L., & Tsao, T. C. (2023). Compensating aerodynamics of over-actuated multi-rotor aerial platform with data-driven iterative learning control. IEEE Robotics and Automation Letters.