
国际智能机器人与系统会议(IROS 2025)作为全球机器人领域最具影响力的顶级学术会议之一,将于2025年10月19日至25日在杭州召开。北京通用人工智能研究院(简称“通研院”)联合乐聚机器人、微软亚洲研究院、日本科学技术振兴机构(JST)、上海交通大学、北京大学等单位,共同举办的IROS 2025机器人可靠性研讨会(The Art of Robustness: Surviving Failures in Robotics)将于10月20日上午召开,会议将聚焦机器人在真实环境中可靠性不足的挑战,深入探讨如何使机器人在面对不确定性与故障时,依然能够自主可靠地完成预定任务。

····
····
····
简 介
····
····
····
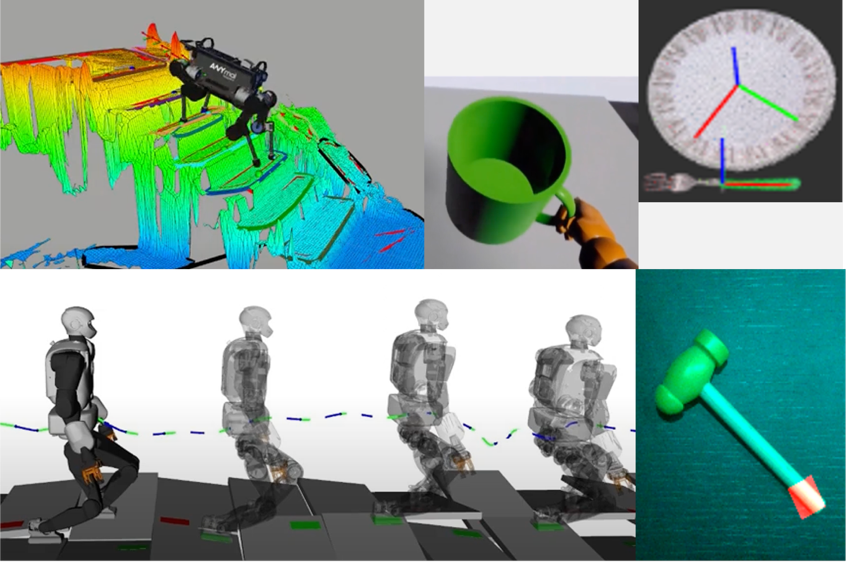
近几年,国内外机器人领域的科研和产业均取得了显著进展。例如,人形机器人开始展现出完成复杂任务的能力,移动机械臂在物流和工业领域展现出广阔的应用前景,外骨骼技术也显著增强了人类的能力。然而,目前将机器人部署于实际应用时仍面临诸多挑战。主要瓶颈之一是各类失败的发生,这些失败削弱了机器人系统的可靠性,限制了机器人在真实场景中执行任务的能力。
本次研讨会@IROS2025将聚焦“机器人失败背后的关键挑战”这一核心议题,重点讨论感知噪声、基于模型方法中的不确定性、基于学习方法的泛化能力有限等问题,并探索创新的解决方案,以提升机器人系统的可靠性。此外,研讨会还将关注一些在学术论文中经常被忽视的实际问题,例如系统集成、调试过程中如何应对和排查故障等工程实践细节。
”
研讨会将汇聚来自机器人多个相关领域的国际知名学者与专家,涵盖全身运动控制、机器人学习、感知与传感、系统工程等方向,分享他们在提升机器人可靠性方面的实践经验与深刻见解。并通过特邀报告、海报展示与圆桌论坛等多种形式,为参会者提供对当前机器人可靠性挑战的全面理解,并呈现为解决这一难题的最新研究进展。
····
····
····
研讨会主题
····
····
····
核心算法:探讨提升机器人可靠性的核心算法,涵盖基于模型与学习的机器人运动规划与控制方法以及二者的融合;算法可扩展性与泛化能力、实时计算能力;感知与传感技术;以及故障恢复算法等关键方向。
系统实现:关注机器人系统的工程实现与部署,包括硬件设计、软件工程与系统集成、仿真到实物的迁移(Sim-to-Real Transfer),以及系统可靠性的评估与验证手段等关键环节。

实践经验:探讨那些在学术论文中常被忽视的实践经验和细节,例如解决故障的调试流程和排查手段,以及面对实验失败时应具备的态度与思维方式。
····
····
····
投稿说明
····
····
····
研讨会现已开放征稿,欢迎通过投稿平台(https://openreview.net/group?id=IEEE.org/IROS/2025/Workshop/TARo#tab-your-consoles)提交最新研究成果。
投稿形式为短文(Extended Abstract),正文部分限2-4页,不含参考文献。请使用IEEE机器人与自动化学会提供的模板(https://ras.papercept.net/conferences/support/support.php)进行撰写。
我们同样欢迎已被接收的相关研究成果在研讨会进行展示。此类投稿请提交已接收的论文稿件。
我们鼓励作者同时提交展示失败案例的视频(可作为链接附在稿件中)。
所有投稿将从研究质量、原创性及主题相关性等方面进行评审。被接收的论文将在研讨会的海报展示环节中进行展示交流。
····
····
····
演讲嘉宾
····
····
····
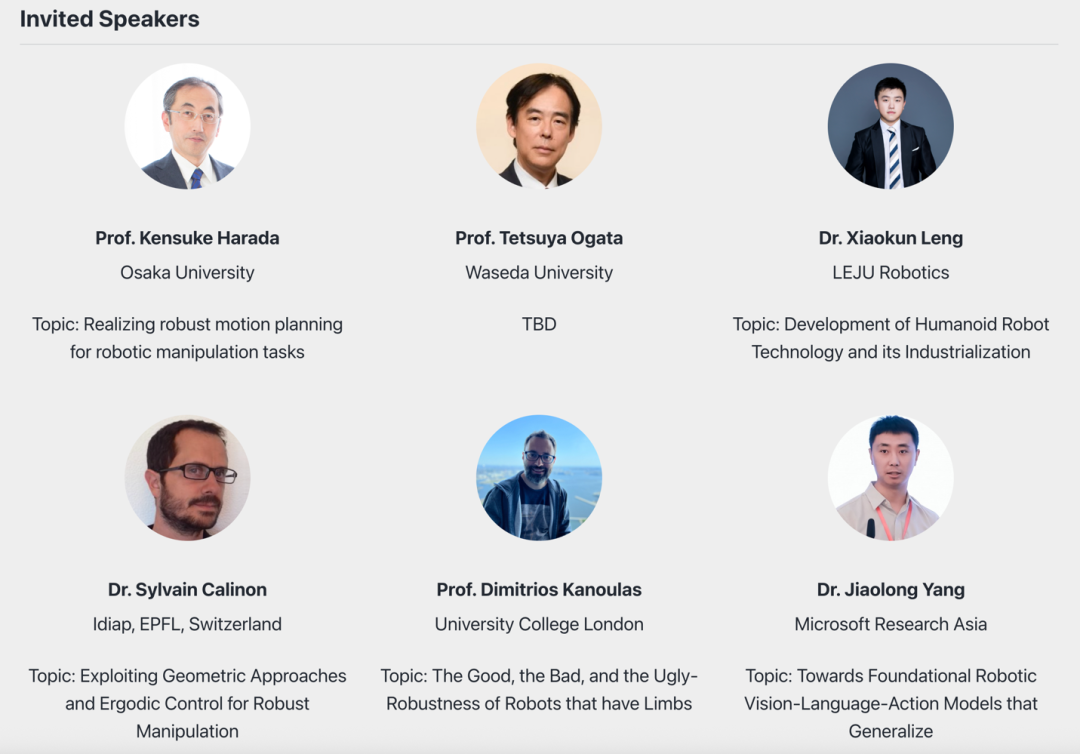
本次研讨会汇聚全球顶尖学者,特邀嘉宾包括:Kensuke Harada (大阪大学),Tetsuya Ogata (早稻田大学),冷晓琨(乐聚机器人), Sylvain Calinon (瑞士Idiap研究所、EPFL),Dimitrios Kanoulas (伦敦大学学院),杨蛟龙(微软亚洲研究院)
····
····
····
组织团队
····
····
····


北京通用人工智能研究院