论文导读
人形机器人由于与人形态的相似性,在智能制造、家居康养、灾难救援等领域展现出了不可替代的价值,人形机器人的设计与控制是推动其发展和应用的关键。在众多复杂动作中,人形机器人的跳跃动作不仅需要其具有性能强悍的电机,也需要鲁棒稳定的控制算法以完成起跳、飞行和着陆整个过程,对人形机器人的机械结构设计、轨迹规划、控制策略都提出了极高要求。
图1. 双足机器人连续跳跃与稳定行走
本文介绍了北京通用人工智能研究院(简称通研院)-乐聚人形机器人联合实验室于2024年6月发表于国际机器人顶级刊物IEEE Robotics and Automation Letters (RAL) 上的研究成果,题为《CDM-MPC: An Integrated Dynamic Planning and Control Framework for Bipedal Robots Jumping》[1]。该工作构建了一套高度为1.2m的人形机器人硬件系统,并基于质心动力学(Centroidal Dynamics Model) 构建基于模型预测控制 (Model Predictive Control)的优化框架,解决了人形机器人连续跳跃的难题。该论文的成果具有重要实际应用价值,其算法已经部署于乐聚的“夸父”高动态人形机器人上,展示了连续跳跃的鲁棒性(如图1所示)。
该论文的第一作者为哈尔滨工业大学何治成博士,共同通讯作者为通研院苏垚研究员、哈尔滨工业大学冷晓琨教授;其他论文作者包括哈尔滨工业大学本科生吴嘉阳、史亚鹏副教授、孙立宁院士和通研院通计划学生张氏博文、张精文研究员、刘航欣研究员。
论文链接:
https://ieeexplore.ieee.org/abstract/document/10545606
研究概述
近年来,高动态人形机器人相关研究取得重大进展,足式构型的机器人如果能够穿越复杂地形,可帮助人类做很多复杂工作。要实现人形机器人的这项能力,除了行走和奔跑之外,动态跳跃也是关键技术之一,对于提高人形机器人对不同地形场景的适应性和灵活性至关重要。
人形机器人的跳跃控制是一项极具挑战的任务,需要有强大的电机和高效的驱动器以提供足够的动力,同时需要计算落足点,以实现精确的跳跃控制。如图2所示,整个跳跃过程大体上可以划分为三个阶段:在起跳阶段,需要根据机器人的全动力学模型进行精确的动力学轨迹规划(kinodynamic motion planing); 在空中阶段,由于没有外力接触导致躯干控制困难,需要进行快速的动力学轨迹重规划实时调整飞行姿态 (real-time MPC);而在落地时,需要稳健的控制策略以缓解冲击力 (landing heuristic controller)。在跳跃的每个阶段都有许多亟需解决的问题,从而导致了跳跃控制的困难[2-5]。
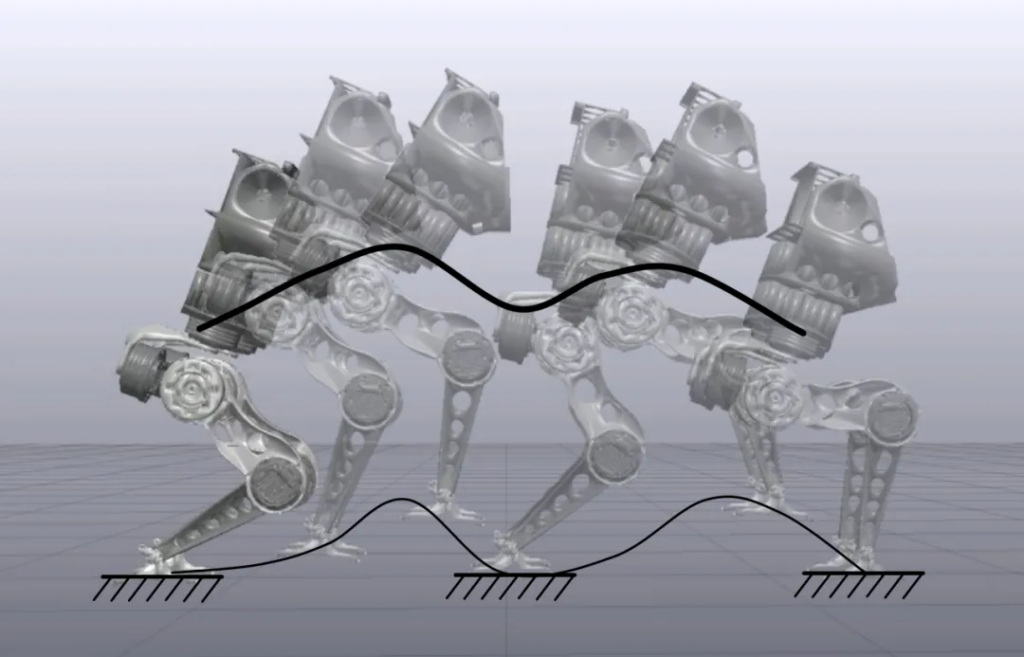
图2. 人形机器人跳跃过程示意
双足机器人全身动力学模型是高度非线性的,无法进行实时的轨迹规划。因此,受限于计算效率,一般采用简化的机器人动力学模型进行建模控制,例如线性倒立摆模型(LIPM)、弹簧线性倒立摆(SLIPM)、单刚体模型(SRBM)等[6-7]。但与行走或跑步相比,跳跃控制中对质心动量( Centroidal Angular Momentum ) 进行控制十分关键,因此采用如图3所示的,质心动力学模型(centroidal dynamics model-CDM)对质心角动量的精准控制贯穿整个控制过程[8-9]。
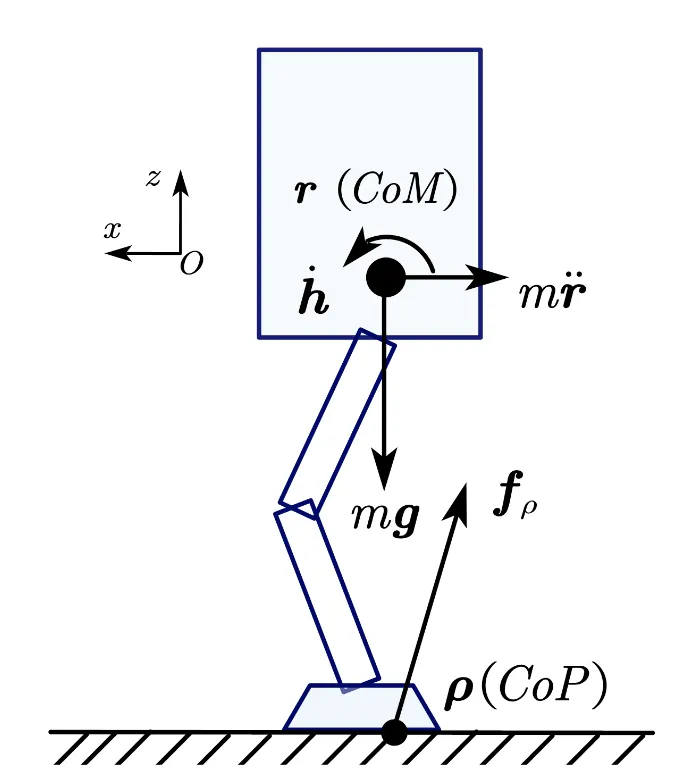
图3. 机器人简化模型外力分析
在本研究中,我们提出了一种专为人形机器人设计的新颖跳跃规划控制框架——基于质心动力学模型的模型预测控制框架 ( Centroidal Dynamics Model-based Model Predictive Control ) 。该框架不仅充分考虑了质心动量控制,还考虑了在跳跃空中阶段由于腿伸缩而导致的非恒定的刚体映射到质心的惯量 ( centroidal composite rigid body inertia ) ,从而实现对机器人姿态的精确控制。
硬件设计
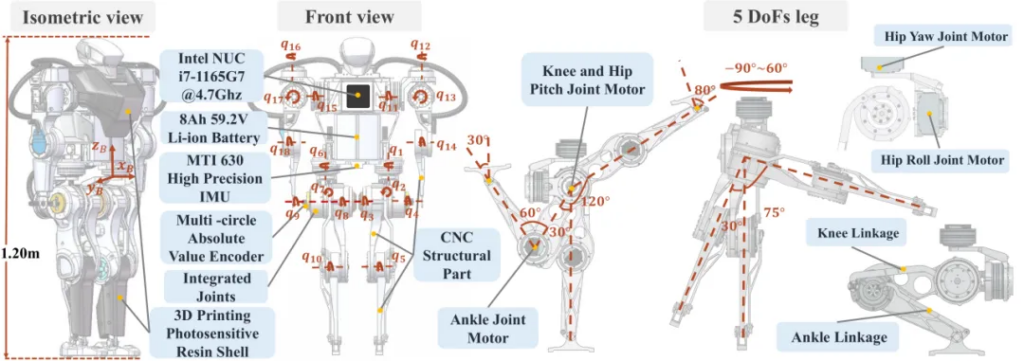
图4. 硬件结构设计与双足机器人关节构型
研究中搭建了机器人硬件平台以对提出控制框架的效果进行验证。该实物平台站立高度为1.2m,重量为34.5kg,拥有18个自由度,包含两只五自由度腿与四自由度手臂。采用将控制踝关节处旋转的电机设置在膝关节处,将控制膝关节处的关节旋转电机放置在髋关节处的设计,以减小腿部的转动惯量,从而能够提高腿部控制的响应速度,实现更加高动态的运动。
跳跃控制框架
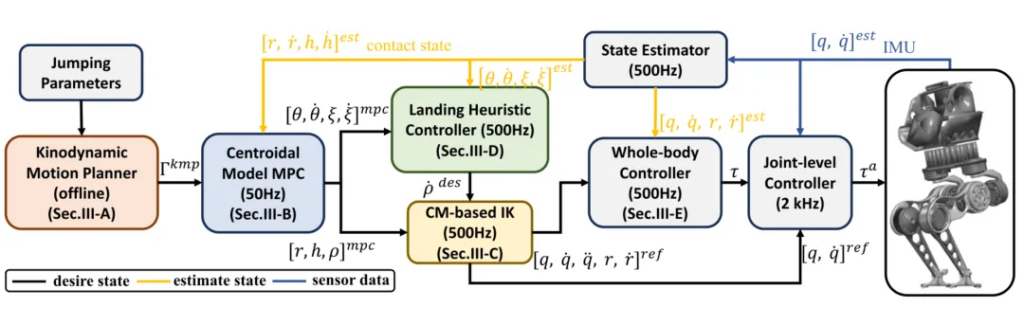
图5. 人形机器人跳跃控制框架
针对人形机器人跳跃问题,我们设计了CDM-MPC控制框架,框架采用层级结构,以实现鲁棒控制。框架包含以下模块:
(1)基于kino-dynamic的轨迹规划模块,用于生成质心 (CoM) 与质心角动量 (CAM) 的轨迹,同时考虑接触点与接触力。
(2)基于质心动力学的实时轨迹规划预测控制,用于实时轨迹跟踪与快速在线与重规划,并考虑了飞行过程中的非恒定腿部惯量,准确操控身体姿态[10,11]。
(3)着陆点控制器,用于根据跳跃速度需求,计算落足点位置,调节着陆角度和腿部长度以实现稳定着陆。
(4)基于质心动量的运动学逆解模块,该模块用于计算全身轨迹,确保精确的质心动量跟踪。
实验结果
我们同时在仿真平台与实物平台对研究所提出的控制方法进行验证。在原地跳跃抗扰动实验中,将方法与SRBM进行比较,跳跃过程中在躯干上施加一个20Nm,维持0.1s的旋转扰动力,从图中可以看出,采用SRBM的跳跃未能抵抗外力扰动,而采用CDM-MPC控制框架的机器人,通过跳跃过程中对机器人质心动量进行分析,从而对落地腿的长度和角度进行控制,从而成功抵抗外力扰动。
图6. 机器人原地跳跃抗扰实验(未采用本论文控制方法的失败案例与采用本论文控制方法的成功案例)
图7. 在仿真中以1.5m/s的速度连续跳跃
而在实物平台上,夸父机器人执行了多次连续的垂直跳跃,每次跳跃高度约为0.28m,并使用CDM-MPC控制框架实现了稳定着陆。通过硬件实验充分验证了机器人跳跃控制的鲁棒性,并可以做到近乎100%的实机跳跃成功率。
图8. 实物机器人原地跳跃实验
总结和展望
本论文提出的CDM-MPC框架为人形机器人的跳跃控制提供了一种创新的解决方案,这不仅在技术上推动了高动态机器人技术的发展,而且在理论和实践层面为机器人学、人工智能、神经学等多学科的融合提供了有益的范例。通过构建高度为1.2米的人形机器人硬件系统,研究团队展示了CDM-MPC在仿真和真实世界中的有效性,证明了该框架在处理复杂动态运动时的鲁棒性和适应性。未来,通研院-乐聚人形机器人联合实验室将进一步优化控制框架,提高其在复杂环境中的适应性和鲁棒性,同时探索新的控制策略以实现更复杂的动态行为。通过打造通用智能体控制框架,促进相关学科的理论发展,并为中国在具身智能机器人技术领域的领先地位奠定基础。
/参考文献 /
[1] He, Z., Wu, J., Zhang, J., Zhang, S., Shi, Y., Liu, H., Sun, L., Su, Y. and Leng, X., 2024. Cdm-mpc: An integrated dynamic planning and control framework for bipedal robots jumping. IEEE Robotics and Automation Letters.
[2] Zhang, J., Shen, J., Liu, Y. and Hong, D., 2023, October. Design of a jumping control framework with heuristic landing for bipedal robots. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 8502-8509). IEEE.
[3] Wensing, P.M., Posa, M., Hu, Y., Escande, A., Mansard, N. and Del Prete, A.,2023. Optimization-based control for dynamic legged robots. IEEE Transactions on Robotics.
[4] Zhou, Z., Wingo, B., Boyd, N., Hutchinson, S. and Zhao, Y., 2022. Momentum-aware trajectory optimization and control for agile quadrupedal locomotion. IEEE Robotics and Automation Letters, 7(3), pp.7755-7762.
[5] Chignoli, M., Kim, D., Stanger-Jones, E. and Kim, S., 2021, July. The MIT humanoid robot: Design, motion planning, and control for acrobatic behaviors. In 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids) (pp. 1-8). IEEE.
[6] Shen, J., Zhang, J., Liu, Y. and Hong, D., 2022, November. Implementation of a robust dynamic walking controller on a miniature bipedal robot with proprioceptive actuation. In 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids) (pp. 39-46). IEEE.
[7] Liu, Y., Shen, J., Zhang, J., Zhang, X., Zhu, T. and Hong, D., 2022, May. Design and control of a miniature bipedal robot with proprioceptive actuation for dynamic behaviors. In 2022 International Conference on Robotics and Automation (ICRA) (pp. 8547-8553). IEEE.
[8] Vatavuk, I. and Kovačić, Z., 2021, May. Precise jump planning using centroidal dynamics based bilevel optimization. In 2021 IEEE International Conference on Robotics and Automation (ICRA) (pp. 3026-3032). IEEE.
[9] Ponton, B., Khadiv, M., Meduri, A. and Righetti, L., 2021. Efficient multicontact pattern generation with sequential convex approximations of the centroidal dynamics. IEEE Transactions on Robotics, 37(5), pp.1661-1679.
[10] Scianca, N., De Simone, D., Lanari, L. and Oriolo, G., 2020. MPC for humanoid gait generation: Stability and feasibility. IEEE Transactions on Robotics, 36(4), pp.1171-1188.
[11] Grandia, R., Jenelten, F., Yang, S., Farshidian, F. and Hutter, M., 2023. Perceptive locomotion through nonlinear model-predictive control. IEEE Transactions on Robotics, 39(5), pp.3402-3421.