
2025年10月19日至25日
国际机器人与智能系统顶级盛会
IROS 2025将在杭州国际博览中心举行
本届大会预计汇聚逾7000位来自全球机器人
人工智能与自动化领域的专家学者
共同探讨最前沿的研究成果与技术进展
大会特邀
北京通用人工智能研究院(BIGAI)院长朱松纯
在21日上午的开幕式上
作60分钟 Plenary 大会报告
据悉,本次大会一共邀请了三位学者
作plenary 报告
另外两位分别是
苏黎世联邦理工学院Marco Hutter教授
首尔大学Hyoun JIN Kim教授
早在2010年前后
朱松纯教授从计算机视觉的研究
扩展到认知智能、具身机器人等领域
并两次领导了美国多大学
(Brown,Caltech,CMU, Stanford, UCBerkeley,UCLA, UIUC,Yale 等)
跨学科(视觉、认知、机器人、统计、学习)
的MURI研究计划
探索三维场景理解
场景与物体的功能、可供性、工具使用
物理与社交智能等前沿方向,这些方向正是当前机器人研究的重要挑战
2020年归国以来
推动成立北京通用人工智能研究院
并开启通用人工智能的前沿探索
在认知机器人、具身智能方面
取得多项全球领先成果
产生了较大的国际影响
”
以下是近一年来的几项代表工作:
-
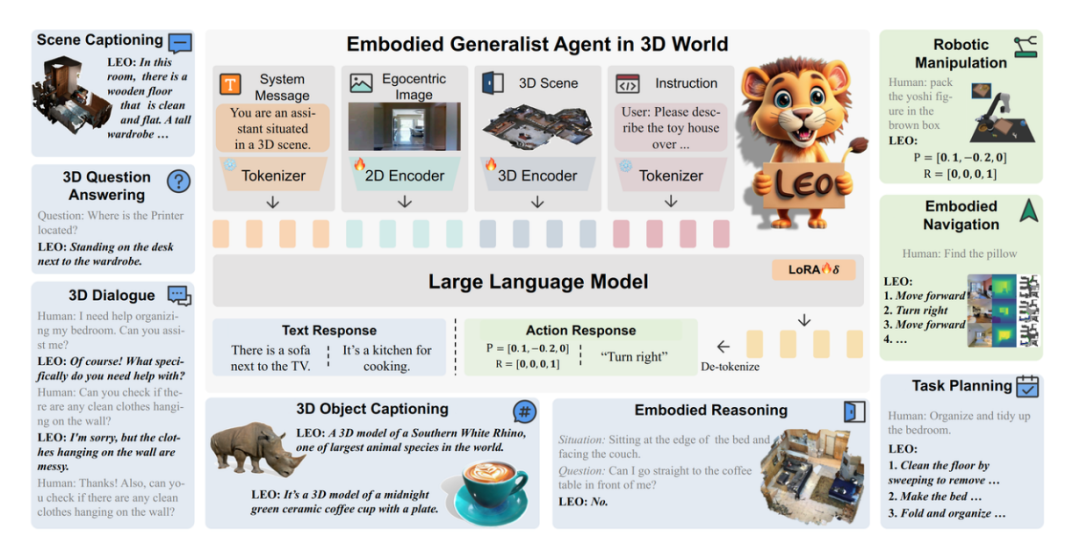
2024年5月,通研院在AI顶级会议 ICML上发布首个具有原生空间理解能力的具身智能大模型“狮子座(LEO)”,不仅刷新了三维空间多模态推理模型的世界纪录,还首次突破了从空间智能基础模型到空间具身智能体VLA的训练瓶颈。(相关报道:通研院提出首个精通3D任务的具身智能体LEO)
-
2025年6月,研究成果触觉灵巧机器手(F-TAC Hand)发表在国际顶尖期刊《自然·机器智能》(Nature Machine Intelligence),该成果展现出类人水平的自适应抓取能力,实现机器人与真实动态环境交互能力的一次重大飞跃。(相关报道:通研院、北大突破性成果登《自然·机器智能》:仿生灵巧手F-TAC首次实现类人水平的自适应抓取能力)

-
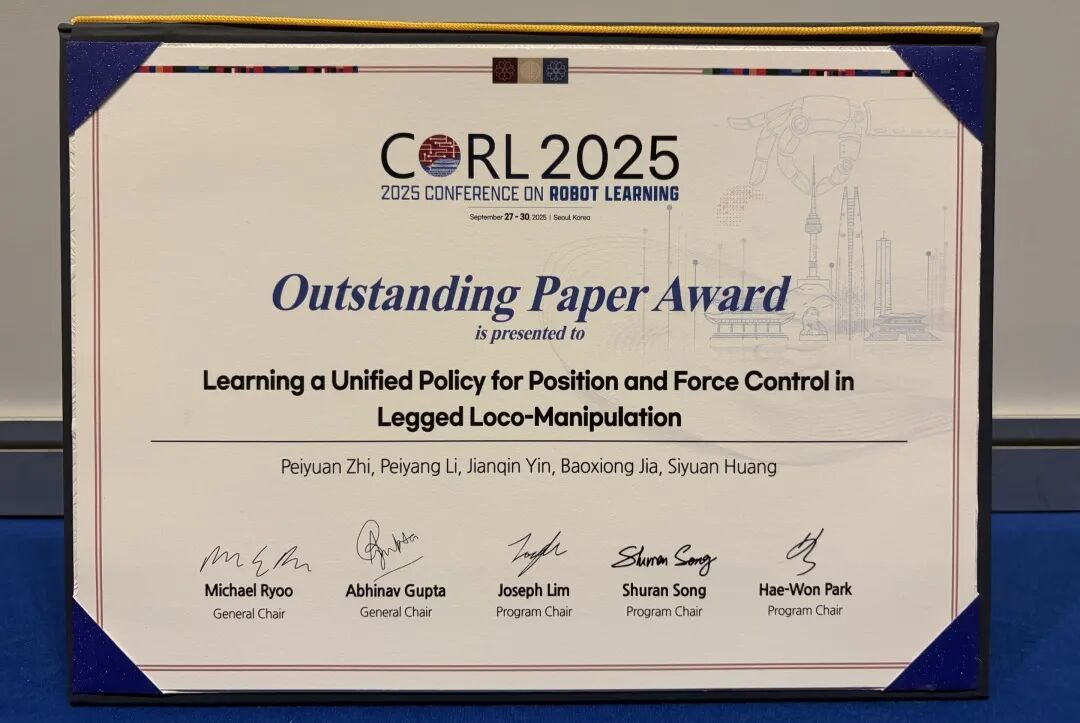
2025年9月,在全球顶级AI会议——国际机器人学习大会(CoRL )上,通研院提出的首个力位混合控制算法,从近千篇投稿中脱颖而出,荣获大会最高奖项“杰出论文奖(Outstanding Paper Award)”,该研究推动机器人真正理解并掌握与物理世界交互的方式,为具身机器人赋予类人级别的物理智能。(相关报道:全球最聪明的具身大脑 | 通研院通智大脑“力位混合控制算法的统一理论”获机器人学习大会CoRL杰出论文奖)
在生态建设与产业应用方面:
2024年中关村论坛上,通研院正式发布具身智能训练与仿真平台——通境(TongVerse),作为技术底座平台支撑中国机器人及人工智能大赛(CRAIC)赛事、“挑战杯”竞赛“人工智能+”专项赛等国家级赛事,为学术界与工业界提供高精度、低成本的研究基础设施,累计服务千余支赛队在平台中进行角逐。

2024年,通研院先后与国内领先人形机器人头部企业乐聚、宇树等成立联合实验室,共同探索具身智能技术创新与产业化应用。
2025年,在中关村论坛上,通研院正式推出“通智大脑”全栈式具身智能底座。“通智大脑”是通研院自主研发的通用具身机器人大脑,基于全球首个通用智能人“通通”的核心技术,深度集成遥操作、视觉感知、导航定位、灵巧操作与任务规划等核心技术,构建了贯通感知—理解—决策—执行的具身智能体框架。同时,通研院联合乐聚、宇树等企业共同发起成立“通智大脑联盟”,聚焦垂直领域的“通智大脑”与具身本体的协同研发与应用,加速关键技术突破与产业化落地。

-
2025年8月,在首届世界人形机器人运动会单机舞蹈比赛中,通研院战队以极高的动作流畅度与拟人化表现,从20余支队伍中脱颖而出,荣获冠军。

-
2025年8月,通研院“清华通班队” 以满分成绩荣获第二十七届中国机器人及人工智能大赛人形机器人专项赛·创新挑战赛实体赛一等奖第一名。
同时,通研院构建了高质量三维重建算法及配套的具身场景理解数据生成框架,实现了仅依靠图像采集设备即可快速生成高保真三维场景模型,有效支撑三维通用智能体和具身机器人在真实家庭环境中的训练与测试需求,为“智能体走进千家万户”,解决“最后10厘米”问题,奠定了坚实的技术能力。
“通智大脑”还支撑了2025人形机器人半程马拉松赛事以及2025年中关村论坛、中国国际服务贸易交易会、国际科技园及创新区域协会世界大会(IASP世界大会)等系列活动,推动石景山人形机器人数据场一、二期建设,并将模式输出至湖北、河南等地数采基地,同时相关技术已落地一汽、蔚来等企业,实现工业场景应用。
此外,通研院具身机器人中心还将承办IROS2025专题研讨会 The Art of Robustness: Surviving Failures in Robotics,聚焦机器人系统的可靠性与鲁棒性研究,探讨机器人在复杂环境中“应对失败”的关键技术与方法。
时间:10月20日
地点:杭州国际博览中心多功能厅B
”



北京通用人工智能研究院